 Sydney: Assyrian bishop stabbed, conservative TikToker outspoken on Islam
Sydney: Assyrian bishop stabbed, conservative TikToker outspoken on Islam Torrential rains in Dubai: “The event is so intense that we cannot find analogues in our databases”
Torrential rains in Dubai: “The event is so intense that we cannot find analogues in our databases” Rishi Sunak wants a tobacco-free UK
Rishi Sunak wants a tobacco-free UK In Africa, the number of millionaires will boom over the next ten years
In Africa, the number of millionaires will boom over the next ten years WHO concerned about spread of H5N1 avian flu to new species, including humans
WHO concerned about spread of H5N1 avian flu to new species, including humans New generation mosquito nets prove much more effective against malaria
New generation mosquito nets prove much more effective against malaria Covid-19: everything you need to know about the new vaccination campaign which is starting
Covid-19: everything you need to know about the new vaccination campaign which is starting The best laptops of the moment boast artificial intelligence
The best laptops of the moment boast artificial intelligence Bitcoin halving: what will the planned reduction in emissions from the queen of cryptos change?
Bitcoin halving: what will the planned reduction in emissions from the queen of cryptos change? The Flink home shopping delivery platform will be liquidated in France
The Flink home shopping delivery platform will be liquidated in France Bercy threatens to veto the sale of Biogaran (Servier) to an Indian industrialist
Bercy threatens to veto the sale of Biogaran (Servier) to an Indian industrialist Switch or signaling breakdown, operating incident or catenaries... Do you speak the language of RATP and SNCF?
Switch or signaling breakdown, operating incident or catenaries... Do you speak the language of RATP and SNCF? Who’s Who launches the first edition of its literary prize
Who’s Who launches the first edition of its literary prize Sylvain Amic appointed to the Musée d’Orsay to replace Christophe Leribault
Sylvain Amic appointed to the Musée d’Orsay to replace Christophe Leribault Jeremy Allen White to play Bruce Springsteen for biopic
Jeremy Allen White to play Bruce Springsteen for biopic In Los Angeles, Taylor Swift hides clues about her new album in a library on the street
In Los Angeles, Taylor Swift hides clues about her new album in a library on the street Skoda Kodiaq 2024: a 'beast' plug-in hybrid SUV
Skoda Kodiaq 2024: a 'beast' plug-in hybrid SUV Tesla launches a new Model Y with 600 km of autonomy at a "more accessible price"
Tesla launches a new Model Y with 600 km of autonomy at a "more accessible price" The 10 best-selling cars in March 2024 in Spain: sales fall due to Easter
The 10 best-selling cars in March 2024 in Spain: sales fall due to Easter A private jet company buys more than 100 flying cars
A private jet company buys more than 100 flying cars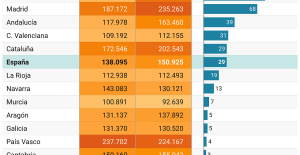 This is how housing prices have changed in Spain in the last decade
This is how housing prices have changed in Spain in the last decade The home mortgage firm drops 10% in January and interest soars to 3.46%
The home mortgage firm drops 10% in January and interest soars to 3.46% The jewel of the Rocío de Nagüeles urbanization: a dream villa in Marbella
The jewel of the Rocío de Nagüeles urbanization: a dream villa in Marbella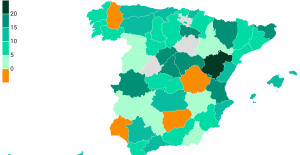 Rental prices grow by 7.3% in February: where does it go up and where does it go down?
Rental prices grow by 7.3% in February: where does it go up and where does it go down? With the promise of a “real burst of authority”, Gabriel Attal provokes the ire of the opposition
With the promise of a “real burst of authority”, Gabriel Attal provokes the ire of the opposition Europeans: the schedule of debates to follow between now and June 9
Europeans: the schedule of debates to follow between now and June 9 Europeans: “In France, there is a left and there is a right,” assures Bellamy
Europeans: “In France, there is a left and there is a right,” assures Bellamy During the night of the economy, the right points out the budgetary flaws of the macronie
During the night of the economy, the right points out the budgetary flaws of the macronie These French cities that will boycott the World Cup in Qatar
These French cities that will boycott the World Cup in Qatar Tour of the Alps: Simon Carr takes on the 4th stage of the Tour of the Alps, marked by a big scare
Tour of the Alps: Simon Carr takes on the 4th stage of the Tour of the Alps, marked by a big scare Cycling: in video, Chris Harper's big scare on the 4th stage of the Tour des Alpes
Cycling: in video, Chris Harper's big scare on the 4th stage of the Tour des Alpes Football: Mathieu Coutadeur will retire at the end of the season
Football: Mathieu Coutadeur will retire at the end of the season Athletics: young Tebogo says African sprinters will dominate the season
Athletics: young Tebogo says African sprinters will dominate the season
The last few days, an advertisement on the social media Instagram of influenceren and tv-the celebrity Fie Laursen created heated debate.
In a posting on the social media promoted Fie Laursen: for sugardating and told among other things, his many young followers, how she even earned money from selling her used panties, and encouraged his followers to do the same.
See also: Big mistake: Why it went wrong
The controversial advertising was day then many well-known danes to react strongly and to distance itself from the advertisement. One of them, who responded, was 'X Factor'host Sofie Linde.
In a video on her Instagram profile, she said, among other things, the following:
- If something sounds too good to be true, it usually also. It with to meet up with strangers is something you should be extremely careful. I would invite you to let be, said among other Sofie Linde, continued:
- Fie Laursen forget to mention something very, very important. The sugardating websites also act as prostitutionssider. You can risk to receive offers of direct prostitution - i.e. sexual services for money - and such a dilemma, I do not want any young people to stand in, she said further.
Sofie Linde calls on all young people to think about an extra time, when they see Fie Laursens advertising. Photo: Mogens Flindt
En Ekstra Bladet met Sofie Linde on Friday night immediately after the 'X Factor'finals, she put more words on why she chose to speak up on his Instagram profile.
- In fact, I think just that it is super far-fetched, that there is a sugardating-page, which has hired an influencer of 23 years with a very young følgerskare to advertise, what I will call the gray area-prostitution. She is the influencer and is been paid to advertise and have been briefed as to how she should do, she said, among other things, to Ekstra Bladet.
Film, tv & radio - 22. may. 2020 - pm. 22:48 In tears on the stage: - It comes as a shock
Sofie Linde told, moreover, that she is worried that some of her own young followers could fall into the trap, and therefore she chose to say.
- Since I am one of the profiles on Instagram, which also has many young followers, who are in the same target audience as the Fies, so I feel that I might be able to go out and explore this here advertisement, it sounded from Sofie Linde, continued:
But the real question lies in, what happens to a sugardatingfirma hires a 23-year-old influencer to advertise? I also think it is far-fetched, and I would be good to know what the subject was. It is very disgusting, she stressed and told me that she received a lot of positive reactions in the wake of the spread.
not famous and best-selling was excited for the Fie Laursens advertising. Photo: Martin Sylvest/Ritzau Scanpix
the judge famous and best-selling have noticed Fie Laursens advertising, and nor does he was excited when Ekstra Bladet spoke with him on Friday night.
- I think damn, that's too bad. I don't know how much I will say other than that it seems to me that she has it hard and speicelt. The whole situation is downturn in all sorts of ways, said the judge, in the same place came with an invitation to the young people at home in the living rooms:
- For god's sake, don't do it that sugardating, dammit. It applies to all, but especially you young people, he said further.
Expert: Very problematic
According to Camilla Stemann Jensen, who is an expert in social media and among other things is behind the Influencer Academy, it is extremely problematic when influencere advertises for things like sugardating.
It told she, as the Extra Leaf back in march talked with her, as Fie Laursen recently advertised for sugardating.
The big problem is, of course, that such advertisements can go in and affect the very young, who are supplied with. It is also the same reason that, for example, Instagram has introduced restrictions on the operations must not be shown to people under 18. When such a great player like Instagram to make some of those blockages, it also shows that there are problems associated with it, she said at the time.
- Just in relation to sugardating, it's not something we would encourage our children to do, and it becomes by many not seen as morally correct. Such advertisements can go in and influence people's perception of what is right and wrong, and young people are especially vulnerable.
Camilla Stemann Jensen also told me that she was glad that they among others at the Danish union of journalists is in the process of drafting ethical guidelines for bloggers and influencere.
- I think that bloggers must have some guidelines that they must live up to, just like journalists. It is important to have ideals that it is not in order to write fake news, and that there are ethical guidelines that must be adhered to, it sounded from Camilla Stemann Jensen in march.
Show more Closethe Extra Leaf has repeatedly tried to get a comment from Fie Laursen in connection with the case, but she has not returned our inquiries.